|
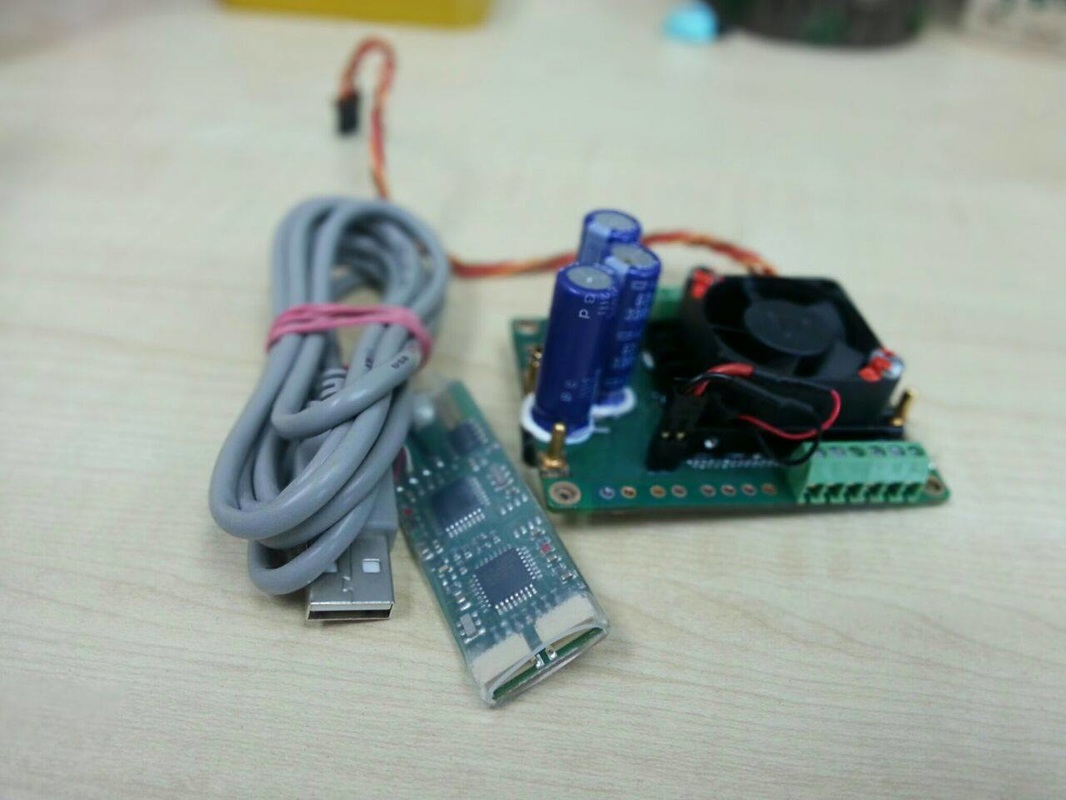
Hey guys, sorry for the late updates, last week, our controller board FINALLY arrived! Talk about rushed development cycle! We have to figure our the operation of the board ASAP! It turns out, this board is so expensive for a number of reasons. First of all, it supports different types of input, be it potentiometer, PWM, Serial, or even TTL logic. This makes it really versatile for different purposes. The manufacturer advertises it as being able to control planes, boats as well as cars. To design the control system, we basically configure the board to receive PWM input from the RF receiver module. Normally, in an RC car, the PWM signals will be fed into an Electronic Speed Controller (ESC), which will in turn, control the main motor of the RC car. For our case, this board is our ESC, and the signal from the RC module will be fed directly into the board. 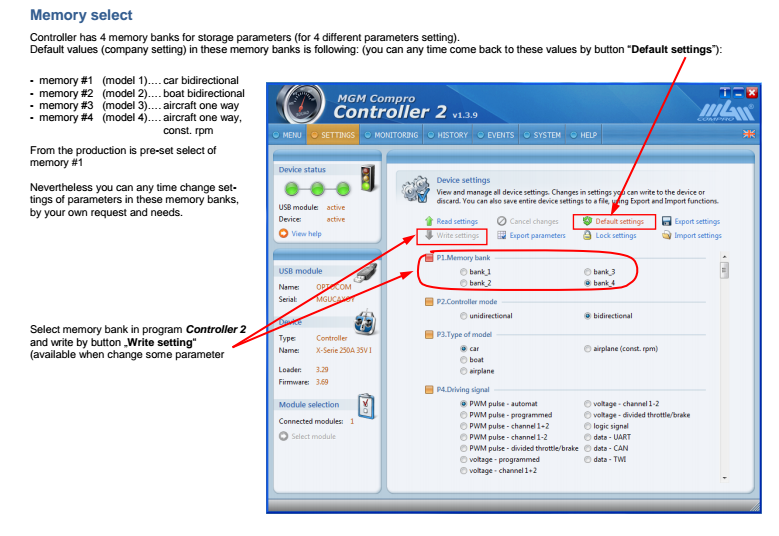 Programming the board is relatively straightforward. There are several preset values for the boat which will be available for us to load into the controller. The settings are defined as memory 'banks', which contains settings optimized for various applications. For our case, we are modifying the settings with Bank_2 as our starting point.
More updates will be posted once the device is ready for test.
0 Comments
Leave a Reply. |
SwinsurfersGet the latest updates on build progress right here. Archives
May 2016
Categories |
 RSS Feed
RSS Feed
